
ຂົວ Zhongtang ເທິງ xx ທາງດ່ວນມີ span ຕົ້ນຕໍຂອງ 32.5 + 4 × 45 + 32.5m ແລະພາກສ່ວນເທົ່າທຽມກັນ prestressed reinforced ກ່ອງ girder (ວິທີການ post-tensioning), ມີຄວາມຍາວທັງຫມົດ 245.9m. ຊ່ອງໃສ່ກະເປົ໋າເປັນຫ້ອງດຽວ, ຄວາມສູງຂອງເສັ້ນກາງແມ່ນ 308.25 ຊມ, ຄວາມກວ້າງຂອງມຸງແມ່ນ 1100 ຊຕມ (ຄວາມກວ້າງຂອງຂົວແມ່ນ 12 ແມັດ), ແລະຄວາມກວ້າງຂອງແຜ່ນລຸ່ມແມ່ນ 480 ຊຕມ. ເວັບໄຊຕ໌ແມ່ນ inclined, ແລະໄລຍະກາງຢູ່ແຜ່ນເທິງແມ່ນ 570cm. ປາຍ beam ແລະກາງຂອງ beam ທັງຫມົດແມ່ນສະຫນອງໃຫ້ກັບ beam, ແລະສ່ວນທີ່ເຫຼືອແມ່ນສະຫນອງໃຫ້ກັບ diaphragms ທຸກໆ 15m.
ພື້ນຖານຂອງຂົວຫຼັກແມ່ນ 4 ເສົາທີ່ຝັງຢູ່ໃນບ່ອນທີ່ມີເສັ້ນຜ່າສູນກາງ 120 ຊຕມ, ເຊິ່ງຝັງຢູ່ໃນພື້ນທີ່ເລິກກວ່າ 50 ຊຕມ. ຮ່າງກາຍຂອງທ່າເຮືອຮັບຮອງເອົາໂຄງສ້າງສອງຖັນຂອງຄອນກີດເສີມທີ່ມີເສັ້ນຜ່າກາງ 180 ຊມ.
ເມື່ອຂົວຖືກສ້າງຂື້ນ, ວິທີການ SSY ຖືກນໍາໃຊ້, ນັ້ນແມ່ນ, ວິທີການຍູ້ຫຼາຍຈຸດແມ່ນໃຊ້ເພື່ອຕັ້ງ beam. ລັກສະນະຂອງວິທີການນີ້ແມ່ນ: ຜົນບັງຄັບໃຊ້ຕິກິຣິຍາອອກຕາມລວງນອນໃນເວລາທີ່ pushing (ດຶງ) ຮ່າງກາຍ beam ແມ່ນກະແຈກກະຈາຍແລະປະຕິບັດໃນແຕ່ລະ pier, ແລະການດໍາເນີນງານ pushing (ດຶງ) ສາມາດຄວບຄຸມສູນກາງ. ເນື່ອງຈາກບໍ່ມີທ່າເຮືອຊົ່ວຄາວໃນເວລາເຮັດວຽກ, ດ້ານໜ້າຂອງກ່ອງໃສ່ກ່ອງແມ່ນເຊື່ອມຕໍ່ກັບຕັ່ງເຫຼັກທີ່ເຮັດດ້ວຍເຫຼັກຍາວ 30 ແມັດ ເປັນສາຍນຳທາງ.
ໃນເວລາທີ່ girder ກ່ອງ prefabricated ໄດ້ຖືກ pushed ຂຶ້ນ, ມັນໄດ້ຖືກປະຕິບັດເປັນວົງຈອນຕາມຂັ້ນຕອນຂອງການກ້າວຫນ້າ → beam ຍົກ → ຫຼຸດລົງ beam → propulsion. ຮູບທີ 1 ສະແດງໃຫ້ເຫັນກໍລະນີຂອງວົງຈອນ.
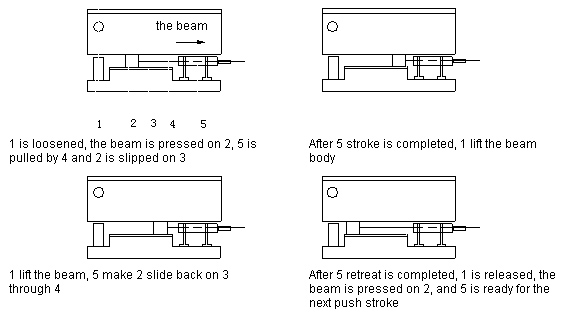
ແຜນວາດຂອງຂັ້ນຕອນການຊຸກຍູ້
1—ກະບອກແນວຕັ້ງເ2——ລາກຫົວເ3—ສທາງຂ້າງເ4—ປulling Rodເ5—ຮທໍ່ທາງຂວາງ
ມັນສາມາດເຫັນໄດ້ວ່າເພື່ອຮັບຮູ້ວົງຈອນຂອງໂຄງການນີ້, ກະບອກແນວນອນສໍາເລັດການປະຕິບັດການຍູ້ girder ກ່ອງຜ່ານອຸປະກອນເລື່ອນໄດ້, ແລະກະບອກຕັ້ງຕັ້ງສໍາເລັດການປະຕິບັດຂອງການຍົກແລະຫຼຸດລົງ beam ໄດ້. ນັ້ນແມ່ນ, ທໍ່ແນວນອນແລະກະບອກຕັ້ງແມ່ນປະຕິບັດສະລັບກັນ.

1. ລະບົບໄຮໂດຼລິກຂອງ beam pusher ຫຼາຍຈຸດແລະການຄວບຄຸມຂອງຕົນ
ທັງສອງກະບອກແນວນອນແລະກະບອກຕັ້ງແມ່ນຂັບເຄື່ອນດ້ວຍໄຮໂດຼລິກແລະຄວບຄຸມໂດຍໄຟຟ້າ. ຄວາມຍາວທັງຫມົດຂອງ girder ປ່ອງທີ່ຈະ pushed ສໍາລັບຂົວແມ່ນ 225m, ແລະແມັດເສັ້ນຂອງແຕ່ລະມີນ້ໍາຫນັກ 16.8t, ມີນ້ໍາທັງຫມົດປະມານ 3770t. ດັ່ງນັ້ນ, ທັງໝົດ 10 ກະບອກແນວນອນ ແລະ 24 ກະບອກຕັ້ງ (ຄວາມດັນນ້ຳມັນແມ່ນ 320kg/cm2 ແລະ ຜົນຜະລິດແມ່ນ 250t). ມີ 5 ທ່າເຮືອທີ່ມີກະບອກລວງນອນ, 2 ສໍາລັບແຕ່ລະທ່າເຮືອ; ມີ 6 ເສົາສໍາລັບ cylinders ຕັ້ງ, 4 ສໍາລັບແຕ່ລະ pier.
jack ແນວຕັ້ງສໍາເລັດການຍົກແລະຫຼຸດລົງຂອງ beam ໄດ້. ໃນຂະບວນການກໍ່ສ້າງ, ຂົວທັງຫມົດແມ່ນບໍ່ຈໍາເປັນຕ້ອງ synchronized, ແລະ piers ຈໍາເປັນຕ້ອງໄດ້ແບ່ງອອກ, ດັ່ງນັ້ນບໍ່ມີບັນຫາຂອງການຄວບຄຸມສູນກາງ. ການຄວບຄຸມໄຟຟ້າຂອງມັນສາມາດສໍາເລັດການຍົກຢ່າງຕໍ່ເນື່ອງຫຼືຫຼຸດລົງຂອງ jack, ແລະຍັງສາມາດສໍາເລັດຮູບແບບ jog.
jack ອອກຕາມລວງນອນສໍາເລັດການປະຕິບັດການຍູ້ beam. ຂະບວນການກໍ່ສ້າງຮຽກຮ້ອງໃຫ້ຂົວທັງຫມົດແມ່ນ synchronous, ນັ້ນແມ່ນ, ຜົນຜະລິດຫຼືຢຸດໃນເວລາດຽວກັນ, ດັ່ງນັ້ນການຄວບຄຸມສູນກາງຂອງ jack ອອກຕາມລວງນອນໄດ້ຖືກສ້າງຕັ້ງຂຶ້ນ, ແລະກ່ອງໄຟຟ້າຄວບຄຸມສູນກາງໄດ້ຖືກສ້າງຕັ້ງຂຶ້ນເພື່ອຈຸດປະສົງນີ້.
ການນໍາໃຊ້ jacks ອອກຕາມລວງນອນແລະ jacks ຕັ້ງແມ່ນຄ່ອຍໆເພີ່ມຂຶ້ນ, ແລະ girder ກ່ອງແມ່ນ prefabricated 15m ຕໍ່ຮອບ. ມີການຂະຫຍາຍຕົວຢ່າງຕໍ່ເນື່ອງຂອງ girder ກ່ອງ, ຈໍານວນຂອງ jacks ນໍາໃຊ້ຄ່ອຍໆເພີ່ມຂຶ້ນ. ໃນສອງສາມຮອບສຸດທ້າຍຂອງການຜະລິດ prefabrication, ທັງຫມົດ 10 ຊຸດ jacks ອອກຕາມລວງນອນແລະ 24 jacks ຕັ້ງແມ່ນຖືກນໍາໃຊ້.
ເພື່ອເຊື່ອມຕໍ່ແຕ່ລະທ່າເຮືອກັບຫ້ອງຄວບຄຸມສູນກາງ, ພວກເຮົາໄດ້ຕິດຕັ້ງລະບົບສາຍສົ່ງສຽງ intercom. ການປະຕິບັດໄດ້ພິສູດວ່າລະບົບສາຍສົ່ງໄຮໂດຼລິກແລະວິທີການຄວບຄຸມທີ່ລະບຸໄວ້ຂ້າງເທິງແມ່ນເຊື່ອຖືໄດ້ໃນການນໍາໃຊ້.
ໃຫ້ເວົ້າກ່ຽວກັບປະສົບການຂອງບັນຫາຈໍານວນຫນຶ່ງຂອງການສົ່ງຜ່ານລະບົບໄຮໂດຼລິກຂອງວິທີການ push frame beam ສໍາລັບການອ້າງອິງ.
1. ບັນຫາຂອງລະບຽບຄວາມກົດດັນ graded ຂອງລະບົບໄຮໂດຼລິກ. ບັນຫາຂອງລະບຽບການຄວາມກົດດັນໂດຍຂັ້ນຕອນແມ່ນເອົາໃຈໃສ່ຕໍ່ເນື່ອງເນື່ອງຈາກການພິຈາລະນາທີ່ແຕກຕ່າງກັນຂອງຄວາມຕ້ານທານ friction static ແລະການຕໍ່ຕ້ານ friction ແບບເຄື່ອນໄຫວໃນເວລາທີ່ girder ກ່ອງຍ້າຍ. ໃນອະດີດ, ມັນສະເຫມີເຊື່ອກັນວ່າລະບົບໄຮໂດຼລິກຄວນຈະມີສອງຫຼືສາມຄວາມກົດດັນນ້ໍາມັນ: ເມື່ອຄວາມຕ້ານທານຂອງ friction static ຖືກເອົາຊະນະ, ຄວາມກົດດັນນ້ໍາມັນຂະຫນາດໃຫຍ່ຖືກນໍາໃຊ້; ແລະຄວາມດັນຂອງນ້ໍາມັນນ້ອຍກວ່າຖືກນໍາໃຊ້ໃນເວລາທີ່ beam ກ່ອງເລື່ອນ. ວິທີການແມ່ນການປ່ຽນແປງລະບົບໄຮໂດຼລິກໂດຍການເຊື່ອມຕໍ່ປ່ຽງການບັນເທົາທຸກທີ່ແຕກຕ່າງກັນທີ່ໄດ້ກໍານົດໄວ້. ດ້ວຍວິທີນີ້, ລະບົບໄຮໂດຼລິກແລະການຄວບຄຸມຂອງມັນມີຄວາມຊັບຊ້ອນເລັກນ້ອຍ. ການປະຕິບັດຂອງພວກເຮົາໄດ້ພິສູດວ່າຄວາມກົດດັນນ້ໍາມັນຂອງລະບົບໄຮໂດຼລິກບໍ່ໄດ້ຂຶ້ນກັບຕົວມັນເອງ, ແຕ່ຢູ່ໃນຄວາມຕ້ານທານພາຍນອກຂອງ jack. ນັ້ນແມ່ນ, ໃນເວລາທີ່ລະບົບໄຮໂດຼລິກກໍາລັງເຮັດວຽກ, ຄວາມກົດດັນຂອງນ້ໍາມັນບໍ່ໄດ້ຖືກກໍານົດໂດຍປະລິມານໃນປ້າຍຊື່ຂອງປັ໊ມນ້ໍາມັນ, ແຕ່ໂດຍຄວາມຕ້ານທານທັງຫມົດທີ່ພົບໃນລະຫວ່າງການໄຫຼຂອງນ້ໍາມັນກັບຄືນໄປບ່ອນຖັງນ້ໍາມັນຫຼັງຈາກອອກຈາກປັ໊ມ. . ຖ້າ jack ບໍ່ມີຄວາມຕ້ານທານ (ໂຫຼດ), ຄວາມກົດດັນຂອງປັ໊ມນ້ໍາມັນພຽງແຕ່ຖືກກໍານົດໂດຍການຕໍ່ຕ້ານຂອງທໍ່; ຖ້ານ້ໍາມັນຈາກປັ໊ມນ້ໍາມັນເຂົ້າໄປໃນຊັ້ນບັນຍາກາດຫຼືຖັງນ້ໍາມັນທັນທີ, ຄວາມກົດດັນຂອງປັ໊ມນ້ໍາມັນຈະເປັນສູນ; ຖ້າຄວາມຕ້ານທານ (ໂຫຼດ) R ຂອງ jack ເພີ່ມຂຶ້ນ, ຄວາມກົດດັນຂອງປັ໊ມນ້ໍາມັນກໍ່ເພີ່ມຂຶ້ນ. ໃນເວລາທີ່ jack ໄດ້ຖືກ unloaded, ຄວາມກົດດັນຂອງປັ໊ມນ້ໍາມັນຖືກກໍານົດໂດຍປ່ຽງຫນຶ່ງທາງ; ເມື່ອ jack ຖືກໂຫລດ, ຄວາມກົດດັນຂອງປັ໊ມນ້ໍາມັນ, ນັ້ນແມ່ນ, ຄວາມກົດດັນນ້ໍາມັນຂອງລະບົບຈະຖືກກໍານົດໂດຍການຕໍ່ຕ້ານຂອງ jack. ຄວາມກົດດັນນ້ໍາໃນການເຮັດວຽກແມ່ນຖືກກໍານົດໂດຍການໂຫຼດ jack. ນັ້ນແມ່ນ, ຄວາມກົດດັນຂອງນ້ໍາມັນຂອງລະບົບໄຮໂດຼລິກຈະປ່ຽນຕົວມັນເອງດ້ວຍການຕໍ່ຕ້ານພາຍນອກ, ດັ່ງນັ້ນ, ລະບຽບການຄວາມກົດດັນໂດຍຂັ້ນຕອນແມ່ນບໍ່ຈໍາເປັນ.

2. ບັນຫາການຊິງຄ໌ຂອງ jacks ອອກຕາມລວງນອນ. ຂະບວນການຊຸກຍູ້ຮຽກຮ້ອງໃຫ້ jacks ອອກຕາມລວງນອນຊ້າຍແລະຂວາຄວນຍູ້ beam ໄປຂ້າງຫນ້າດ້ວຍຄວາມໄວດຽວກັນ, ຖ້າບໍ່ດັ່ງນັ້ນ beam ຈະໄດ້ຮັບການ deflected ໃນເວລາທີ່ມັນ slips. ແນ່ນອນ, ສິ່ງທໍາອິດທີ່ຄົນພິຈາລະນາແມ່ນວ່າຜົນບັງຄັບໃຊ້ໂດຍ jacks ອອກຕາມລວງນອນຊ້າຍແລະຂວາກັບຮ່າງກາຍ beam ຄວນເທົ່າທຽມກັນ, ເຊິ່ງຖືກຕ້ອງ. ໃນເວລາທີ່ symmetry ຊ້າຍແລະຂວາຂອງຮ່າງກາຍ beam ແມ່ນດີເລີດ, ແລະຄວາມຕ້ານທານແມ່ນເທົ່າທຽມກັນກັບຊ້າຍແລະຂວາ, ແນ່ນອນ, ຜົນບັງຄັບໃຊ້ໂດຍ jacks ອອກຕາມລວງນອນຊ້າຍແລະຂວາຄວນຈະເທົ່າທຽມກັນ. ການພິຈາລະນາທີສອງແມ່ນວ່າຄວາມໄວຂ້າງຊ້າຍແລະຂວາຄວນຈະເທົ່າທຽມກັນ. ດ້ວຍວິທີນີ້, beam ສາມາດແລ່ນລຽບແລະກົງ. ຢ່າງໃດກໍ່ຕາມ, ມັນເປັນການຍາກສໍາລັບຮ່າງກາຍຂອງ beam ເພື່ອຮັບປະກັນວ່າແຕ່ລະພາກສ່ວນຕ້ອງມີຄວາມສົມດຸນຢ່າງສົມບູນທາງດ້ານຊ້າຍແລະຂວາ, ແລະຄວາມຕ້ານທານຢູ່ເບື້ອງຊ້າຍແລະຂວາຕ້ອງມີຄວາມເທົ່າທຽມກັນ. ຄວາມກົດດັນນ້ໍາມັນທີ່ກ່ຽວຂ້ອງກັບລະບົບທີ່ໄດ້ກ່າວມາຂ້າງເທິງແມ່ນຖືກກໍານົດໂດຍການຕໍ່ຕ້ານພາຍນອກ. ມັນສາມາດຈິນຕະນາການໄດ້ວ່າ jacks ຊ້າຍແລະຂວາຕ້ອງເຮັດວຽກພາຍໃຕ້ເງື່ອນໄຂຄວາມກົດດັນນ້ໍາມັນທີ່ແຕກຕ່າງກັນ, ດັ່ງນັ້ນຄວາມໄວຂອງ jacks ຊ້າຍແລະຂວາຈະ synchronized ໃນເວລານີ້ບໍ? ສໍາລັບ sake ຂອງຕົວຢ່າງ, ມັນສົມມຸດວ່າມີພຽງແຕ່ຫນຶ່ງຄູ່ຂອງ jacks ຂອງຫນຶ່ງ pier ແມ່ນເຮັດວຽກ. ນັບຕັ້ງແຕ່ພວກເຮົາກໍານົດຫນຶ່ງປັ໊ມທີ່ມີຫນຶ່ງ jack, ນີ້ແກ້ໄຂບັນຫາຂອງ synchronization ຄວາມໄວໄດ້ດີຫຼາຍ. ເນື່ອງຈາກວ່າປັ໊ມນ້ໍາມັນທີ່ພວກເຮົາໃຊ້ເປັນປັ໊ມເຄື່ອນທີ່ໃນທາງບວກໃນປະລິມານ, ໃນທາງທິດສະດີ, ບໍ່ວ່າການຕໍ່ຕ້ານນໍ້າມັນທີ່ປໍ້ານໍ້າມັນຈະພົບ (ຄື, ບໍ່ວ່າຄວາມດັນນ້ໍາມັນຂອງລະບົບຈະສູງເທົ່າໃດ), ອັດຕາການໄຫຼຂອງມັນແມ່ນ. ບໍ່ປ່ຽນແປງ. ດັ່ງນັ້ນ, jacks ຊ້າຍແລະຂວາຕ້ອງໄດ້ຮັບການ synchronized. ແນ່ນອນ, ການສະຫລຸບນີ້ຍັງສາມາດຖືກພິຈາລະນາເຖິງສະຖານະການຂອງສອງ piers ມີສີ່ tops, ສາມ piers ມີຫົກ tops, ສີ່ piers ມີແປດ tops, ຫຼືຫ້າ piers ມີສິບ tops. ດັ່ງນັ້ນ, ວິທີການຂອງພວກເຮົາຂອງຫນຶ່ງ pump ແລະຫນຶ່ງເທິງສາມາດຮັບຮູ້ບັນຫາຂອງ synchronization ຊ້າຍແລະຂວາໄດ້ດີຂຶ້ນ. ການປະຕິບັດຍັງໄດ້ພິສູດວ່າໃນ beam ຍູ້, ເສັ້ນສູນກາງຂອງ beam ກ່ອງແມ່ນພື້ນຖານບໍ່ຖືກຊົດເຊີຍ (ເວົ້າຢ່າງເຂັ້ມງວດ, ມັນຄວນຈະຖືກຊົດເຊີຍເລັກນ້ອຍຈາກຊ້າຍຫາຂວາແຕ່ມັນສະເຫມີສາມາດເກັບຮັກສາໄວ້ພາຍໃນຂອບເຂດທີ່ແນ່ນອນ). ຂະບວນການກໍ່ສ້າງຮຽກຮ້ອງໃຫ້ມີການຕິດຕາມຢ່າງໃກ້ຊິດຂອງ deviation ຂອງເສັ້ນສູນກາງ. ຖ້າມັນເກີນ 2 ຊຕມ, ມັນຈໍາເປັນຕ້ອງຖືກແກ້ໄຂ (ດ້ວຍການຊີ້ນໍາດ້ານຂ້າງ). ໃນລະຫວ່າງການຂະບວນການຊຸກຍູ້, ຈໍານວນການແກ້ໄຂແມ່ນຫນ້ອຍຫຼາຍ. ພຽງແຕ່ຫນຶ່ງຫຼືສອງຄັ້ງໃນສາມສິບ pushes (a girder ກ່ອງ 15m). ນີ້ສາມາດຖືວ່າເປັນຜົນລວມຂອງປັດໃຈຈຸດປະສົງຫຼາຍຢ່າງ, ເພາະວ່າເທົ່າທີ່ເຄື່ອງຈັກໄຮໂດຼລິກກ່ຽວຂ້ອງ, ປໍ້ານໍ້າມັນມີບັນຫາການໄຫຼ, jack ມີບັນຫາການຮົ່ວໄຫຼພາຍໃນ (jack ແຕ່ລະແມ່ນແຕກຕ່າງກັນ, ແລະ piston ອາດຈະຢູ່ໃນຕໍາແຫນ່ງທີ່ແຕກຕ່າງກັນ. ), ແລະລະບົບການຮົ່ວໄຫລຂອງອຸປະກອນອື່ນໆພາຍໃນ, ແລະອື່ນໆ, ເຊິ່ງບໍ່ກົງກັນຂ້າມກັບການສະຫລຸບຂອງພວກເຮົາຂ້າງເທິງ.
3. ບັນຫາການຊິງຄ໌ຂອງ jacks ຕັ້ງ. jacks ຕັ້ງຂອງພວກເຮົາເຮັດວຽກໂດຍປັ໊ມທີ່ມີສີ່ jacks, ແລະປ່ຽງ synchronizing ຄວນໄດ້ຮັບການສ້າງຕັ້ງຂຶ້ນ, ເນື່ອງຈາກວ່າປ່ຽງ synchronizing (ຫຼື diverter valve) ສາມາດເຮັດໃຫ້ jacks ຫຼາຍພາຍໃຕ້ການໂຫຼດທີ່ແຕກຕ່າງກັນ (ຄວາມຕ້ານທານ) ຍັງຄົງໄດ້ຮັບອັດຕາສ່ວນ predetermined ຫຼືການສະຫນອງນ້ໍາມັນເທົ່າທຽມກັນເພື່ອບັນລຸ. synchronization. ແຕ່ພິຈາລະນາວ່າປ່ຽງ synchronizing ມີພຽງແຕ່ສອງຊ່ອງສຽບ. ເພື່ອເຮັດໃຫ້ໂຄງສ້າງຂອງລະບົບງ່າຍດາຍ, ບໍ່ມີປ່ຽງ synchronization ໄດ້ຖືກຕິດຕັ້ງ. ພິຈາລະນາວ່ານ້ໍາຫນັກຊ້າຍແລະຂວາຂອງ girder ກ່ອງມີຄວາມສົມມາດ, ມັນບໍ່ແມ່ນບັນຫາໃຫຍ່ທີ່ຈະເຮັດແນວນັ້ນ. ການປະຕິບັດໄດ້ພິສູດວ່າການຄາດຄະເນແມ່ນຖືກຕ້ອງ, jack ຕັ້ງໂດຍພື້ນຖານແລ້ວເພີ່ມຂຶ້ນແລະຕົກລົງ synchronously, ແລະບໍ່ມີບັນຫາໃນການຍົກແລະຫຼຸດລົງຂອງ beam ໄດ້.
ເວລາປະກາດ: 16-05-2022